
In a previous article (read here) I detailed the construction of a Hasler-type self-steering windvane for my own 31-foot gaff cutter. Attributed to the late Blondie Hasler of Jester fame, this type of windvane is a remarkably simple device which will steer a sailboat by holding her to a constant apparent wind angle (which is what all self-steering windvanes do, or are supposed to do). In terms of ruggedness, simplicity, and cost effectiveness, this type of vane excels. It does, however, come with disadvantages, first and foremost being that it can only be implemented on a boat with an outboard (stern-hung) rudder.
But given that your craft does have an outboard rudder, is this type of windvane a good choice for the short-handed ocean cruising sailor? After having circled the world with an Aries vane, and now having sailing some 50,000 miles with my home built Hasler-type vane, my answer to that question is yes. However, it has taken me quite some time to get the Hasler-type vane to steer anywhere near as well as the Aries did. After nearly a decade and about 25,000 miles of ocean sailing I have developed a system I call the Boothby-Hasler-type vane, which will steer my own boat very nearly as well as the old Aries did.

Who Needs a Self-Steering Windvane?
I have had several people tell me that their boat will actually steer itself, sans windvane or autopilot (and the boat is a monohull). When I press them for details, usually I will find out that they were sailing with the wind forward of the beam, either close hauled or close reaching. Now there have been some sailors able to get their craft to self-steer on all points of sail with the helm lashed, as Joshua Slocum famously did with Spray, but these are the exceptions. Most boats will become directionally unstable once the wind gets aft of the beam. Let us understand why this is so.
Consider our sailboat on a close reach. Nearly all sailboats will have a touch of weather helm in such conditions, which means that if we let the tiller go she will naturally round up into the wind. To balance this off we have the helm lashed slightly “up”, that is, with the rudder blade trying to steer her away from the wind (i.e. toward a greater apparent wind angle).

Now to get our boat to self steer in these conditions, we will have our sails just slightly under-trimmed, particularly the mainsail. Let us now consider what happens when our craft starts to wander off course.
First, consider the case where she wanders further off the wind. Now our slightly under-trimmed sails are full of wind and the increased pressure causes her to heel more. An increased heel angle will correspond to an increase in weather helm. This is because, as shown in Fig. 2, the forward component of the Center of Effort (CofE) of the sails shifts outboard and to leeward with an increased heel angle, thus increasing the lever arm from the centerline (where generally opposing drag is situated) which corresponds to an increased torque trying to round the boat up into the wind. This increased weather helm is now stronger than our offsetting “up” helm, and so will cause the boat to round up slightly, thus correcting the wander.
Note: there is also the issue of the underwater flow pattern which changes as the boat heels. This is an extremely complex subject, so suffice it to say that generally the more the boat heels, the more she wants to round up into the wind.

Now consider the case where she wanders closer to the wind. The slightly under-trimmed sails now are even more under trimmed, perhaps now with the luff of the headsail visibly bubbling. The decrease in pressure causes her to stand up straighter, and with less heel angle comes less natural weather helm, hence our bit of up helm is overcompensating and steering her back away from the wind, and thus once again correcting the wander.

Well by now we might be thinking that we picked a gem, that our craft has no need for an expensive, complicated windvane nor a power hungry autopilot. Confident, we apply the same strategy on a broad reach, but to our disappointment the boat starts rounding up into the wind until her sails are luffing and she is nearly stopped. Or to our dismay she tries to sail herself through a jybe.
Why will our boat no longer self-steer? Recall that we are on a broad reach, so the sails are full of wind. Looking at Figs 1-3, we see that trimmed sails exert a force vector on the boat emanating from the combined center of effort of the sails and that this force vector has two components, one pointing dead ahead, which is what is pushing the boat forward, and an orthogonal component pointing directly to leeward, the component that causes a monohull to heel. Moreover, the closer the boat is sailing to the wind, the greater the leeward component. We know from experience that our boat heels the most when sailing to windward, and not at all when going dead down wind.

Once again, let us consider separately the two cases in which the boat wanders off course. First we consider the case where the boat is on a broad reach and begins to wander further off the wind, toward a run. Now as the boat bears away, the leeward component of the CofE becomes less and less, until she comes onto a run, where the leeward component of the CofE is zero (see Fig. 4). As before, generally the less the heel angle, the less the amount of natural weather helm, hence our up helm lashing on a broad reach is probably overcompensating as she bears away–which, instead of correcting the wander, is now contributing to it. This could lead to an uncontrolled jybe if no one gets to the helm in time.
Now consider the second case where the boat begins to round up from a broad reach toward a beam reach. As this happens the leeward component of the CofE is increasing, causing her to heel more, which is increasing the amount of natural weather helm (also the apparent wind speed will increase some as we are no longer sailing away from the wind, which further increases heel angle). This begins overpowering our up helm lashing, and the boat continues to round up until the sails begin to luff. Possibly at this point, with the sails now luffing and the boat standing back up straight, the lashed helm will begin to steer her back off the wind, but I find with my own boat that she has lost so much speed at this point that the rudder does not have sufficient bite. She’ll just wallow about with the sails flogging until I take over on the helm again.
So to sum up, when the wind is forward of the beam, the opposing forces of natural weather helm and our helm lashing are self balancing, steering the boat toward the wind when she wanders away, and away from the wind when she wanders too close. But when sailing off the wind, e.g. on a broad reach, the opposing forces of natural weather helm and our helm lashing are no longer self correcting, and so either a helmsman or some kind of mechanical steering device will be required to keep her on course.
The Boothby-Hasler-type vane
The first time I sailed with the newly installed Hasler-type vane on my own boat I discovered its flaw, a flaw which would take me several years and thousands of miles to solve. The Hasler-type windvane has a tendency to over steer the boat, especially when broad reaching. Before we get into this, let us first review how this windvane works.

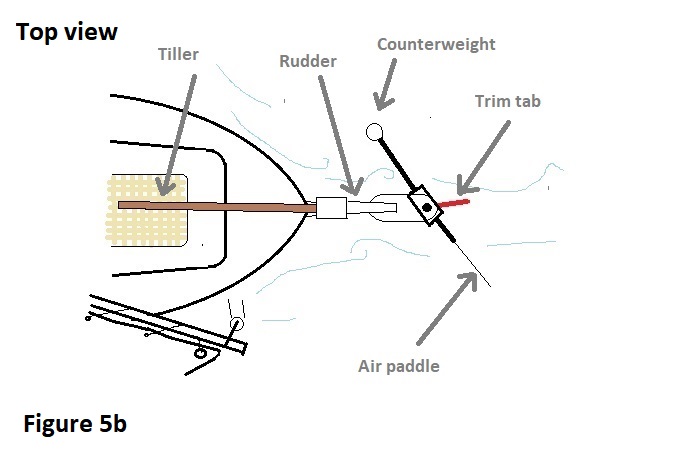
This windvane consists of four primary parts: an air paddle, an engaging mechanism, a shaft, and a trim tab mounted on the trailing edge of the boat’s rudder (see Figs 5a and 5b). When not in use, the air paddle can rotate freely about the shaft above the rudderhead, and the trim tab can freely trail behind the rudder.
Consider the case when we are sailing on our desired course which has us, say, on a close reach. To get the windvane to steer the boat, we simply engage–in my case, clamp–the air paddle to the shaft. Let us understand how this device will now steer our boat.

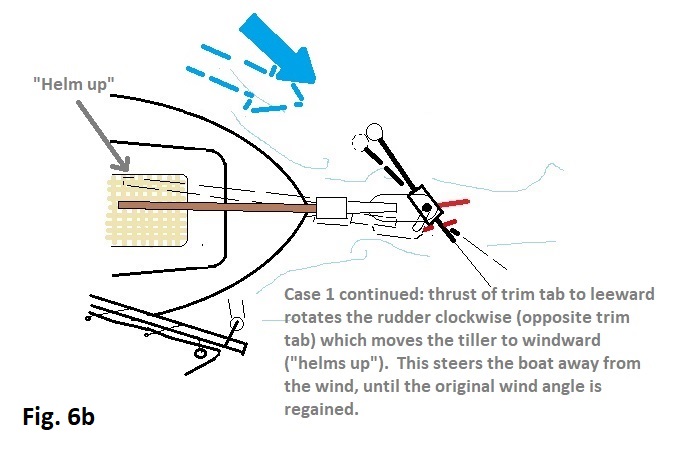
Figures 6a and 6b illustrate the case where the boat wanders closer to the wind. As the apparent wind moves forward (at a closer angle to the boat’s heading) the air paddle rotates the trim tab in the same direction as the change in apparent wind. With the water flowing over the trim tab, and the fact that the trim tab has a good deal of leverage over the rudder, this will cause the trim tab to rotate the rudder in the opposite direction as the trim tab rotation. This is what we want. Referring to Figures 6a and 6b, we see that when the apparent wind rotates counter-clockwise, the self-steering device rotates the rudder clockwise–which alters the boat’s course in a counter-clockwise direction. Hence the self-steering device is steering the boat so as to restore the original apparent wind angle.
Should the apparent wind shift clockwise instead, the air paddle will turn the trim tab clockwise which will rotate the rudder counter-clockwise. This will in turn steer the boat clockwise–once again restoring the original apparent wind angle.
Note that unlike our previous balancing act with sail trim and helm lashings, the mechanics of the self-steering windvane work the same regardless of what point of sail we are on. Whether our boat is close hauled, reaching, or running makes no difference. The windvane is always steering the boat such that it remains at constant angle to the wind.
Now the problem I have come across with this type of windvane is not that it doesn’t steer, but that it steers a bit too vigorously. Contributing to the problem in my case was that my original trim tab was too large. I have since remedied this problem, the trim tab appears to be the correct size–any smaller and it will not have sufficient thrust to move the rudder. Yet still the problem remains that when the trim tab moves the rudder by a change in apparent wind, there is typically a lag time between the rudder response and the air paddle returning to it’s original attitude. And during this lag time the steering vane tends to overshoot the course correction and end up needing another correction back the other way. Sometimes this can result in a kind of feedback loop which has the boat swerving left and right.
Perhaps an example would help to clarify the over steering problem. Say I am sailing on a beam reach (90 degrees true), so the apparent wind is say 80 degrees. Now she wanders off the wind a bit so that the apparent wind is now 95 degrees. This roughly rotates the air paddle and trim tab by 15 degrees, which pushes on the rudder causing it to “helm down” (push the tiller to leeward), or steer the boat back toward the wind. However, due to the aforementioned lag, the boat will not only come back to 80 apparent (90 true), but frequently overshoot it before the air paddle registers 80 apparent again. Hence the boat may be at 65 apparent (80 true) before the air paddle catches up. But now the boat is sailing too close to the wind, and so it causes the rudder to helm up, steering her away from the wind but overshoots again, ending up at say 110 true before is corrects yet again, and on and on.
This is what is meant by over-steering. By moving the rudder too far, too fast, it causes the boat to steer a slalom course, to “steer against itself”. So what is needed is to slow the windvane response down, to decrease the amplitude of the rudder corrections so that when the boat has returned to its original heading the air paddle has had a chance to catch up and say “ok, we’re back on course, I can rest now”.
The simplest and most intuitive way to decrease the amplitude of rudder/tiller movements is by attaching shock cords. I discussed this in my previous article. While this certainly helped, and I sailed with this arrangement for many miles, the shock cords were directly countering–fighting against–the action of the trim tab. In brisk conditions, with the boat moving near hull speed, these forces are considerable. The result is that it wore out shock cords quite quickly and put unnecessary strain on the tiller, rudder, pintles and gudgeons. Harkening back to my physics days, I would say that this is a simple but not elegant solution to the problem.
So instead of fighting the trim tab, how about implementing some sort of re-centering mechanism on the trim tab which decreases the amplitude of tiller movements and slows down the course corrections? So for example if the boat is balanced with the tiller 5 degrees “up”, then we want some arrangement so that whenever the tiller moves either side of this orientation the trim tab wants to push it back to its balanced setting while still allowing the air paddle enough freedom to steer the boat. Such was the genesis of the Boothby-Hasler Self-Steering Windvane.
Let’s have a look at Boothby-Hasler first, then I shall explain how it works.

Looking at Figure 7 above we see that Boothby-Hasler is identical to the Hasler vane except for the addition of a trim tab tiller and a set of shock cords. Simple as that.
Let’s now examine how it works. Let’s begin with the vane disengaged and the boat is sailing at a decent clip. Now say I helm up, that is, I push the tiller to windward (toward the top of the screen). This will rotate the rudder clockwise. As seen in Fig. 8 below, this will pull on the leeward (toward the bottom of the screen) shock cord and slacken the windward one. Pulling on the leeward shock cord pulls on the leeward half of the trim tab tiller, rotating the trim tab in a clockwise direction. Recall from earlier that the trim tab will rotate the rudder in the opposite direction, hence a clockwise rotation in the trim tab will cause a counter-clockwise rotation in the rudder. Thus: we pushed the tiller to rotate the rudder in a clockwise direction and the attached shock cords to rotated the trim tab also in a clockwise direction, which in turn rotated the rudder counter-clockwise–back to it’s original orientation. And so we now have our centering “return the tiller to its original setting” bias effected by the trim tab.

So now we can engage the air paddle with our Boothby-Hasler shock cords suitably tensioned (and sized–this will of course vary from boat to boat). The windvane still operates in the same way as the Hasler detailed above, but the tiller movements are being contained and dampened by the re-centering effect of the shock cords on the trim tab tiller. I find that this will effectively slow down the course correcting by the engaged windvane so as to prevent over steering, and with far less stresses and strains than the more crude method of attaching the shock cords directly to the tiller.
The Evidence
Below is a short video I put together which I hope illustrates the behaviors of Hasler, Hasler with shock cords direct to the tiller, and Boothby-Hasler, respectively.
OK, now for some hard numbers. In an effort to quantify the relative performance of Hasler vs. Boothby-Hasler, I conducted the following tests. Over the course of a 3-minute time period I recorded the vessel heading as indicated by the GPS every 10 seconds, as can be seen in Table 1 below. While perhaps a bit crude, as there is slop in the ongoing GPS calculation of the vessel’s heading, nonetheless it appears adequate for our purpose.

I ran three such sets of tests. The first test compared the two self-steering setups on a broad reach in 10-15 knots of wind. The results are shown in Graph 1.

Where wander is the difference between the heading recorded (in degrees True) at each 10 second time stamp and the average course steered over the 3-minute test period. Average course steered for both tests was about 140 T. I then compared the standard deviation (square root of the variance) of the wander between the two tests. In this case, Boothby-Hasler’s standard deviation was about half that of Hasler–a considerable reduction in the wander.
The second set of tests were conducted with the boat on a beam reach in 6-8 knots of wind. The results are shown in Graph 2 below:

On a beam reach, in this case, there was little difference between the two setups. Indeed when close hauled or close reaching I have noticed that both arrangements work well, which should not be too surprising, for as we discussed earlier, many boats will maintain their heading without any mechanical steering device when the wind is forward of the beam.
I conducted the third set of tests once again on a broad reach with the wind around 10 knots. The results are shown below in Graph 3:

Once again we see that Boothby-Hasler really shines on a broad reach, where the std dev of the wander of Boothby-Hasler is about one third of Hasler.
Admittedly my sample size is small. More tests are needed in a greater variety of conditions. Also I am only working with one boat, my own. Nonetheless, these three sets of tests, combined with the video evidence, combined with several thousand miles of sailing with it, I think already make a compelling case that Boothby-Hasler significantly improves the performance of a Hasler-type self steering windvane. And it is still something you can put together in your garage with materials purchased from your local chandlery and/or hardware store.
